挑战杯报名开启!

2024
挑战杯
开始啦!
第四十三届
挑战杯简介
清华大学 “挑战杯” 学生课外学术科技作品竞赛是由清华大学教务处、科研院、研究生院、校团委和校学生科协共同主办的全校性学生课外学术科技作品竞赛,是清华大学规模最大、历史最长、水平最高、最具影响力的学生课外科技赛事。
报名信息
作品要求
- 申报参赛的作品分为自然科学类学术论文、哲学社会科学类社会调查报告和学术论文、科技发明制作三大类型。科技发明制作类作品须有实物或模型参展。
- 往届参赛作品,如有重大改进和提高,经院系严格评审并报组委会批准后,可再次参加竞赛。
- 学位论文、国际竞赛中获奖的作品、获国家级奖励成果等均不在申报范围之列。
- 原则上要求第一作者的工作量应该占整个项目工作量 40% 以上,其余作者每人工作量不低于 10%。作者总数不超过 6 人(团体作者除外),对于有共同第一作者的项目,原则上最多申报 4 人。如两人工作量相似,且均满足第一作者要求,可以以共同第一作者申报。
学科类型
信息技术、机械控制、环保建设与碳中和、能源化工、基础科学、人文社科。
申报途径
作品需明确一位申报人,申报人应为作品第一作者,或共同第一作者中的一人。
- 院系申报:
凡在竞赛举办学期初正式注册的全日制本科生、硕士研究生和博士研究生(均不含在职研究生)都可通过院系申报作品参赛。 - 校科协申报:
在学校有关部门正式注册的社团协会(包括科技兴趣团队)、学生组织、实践支队可以以团体的名义通过校学生科协申报参赛,不占用院系推荐作品名额。
赛程与评审
赛程节点
- 报名即刻开始,预计于第 13 周末截止,在此之前,可持续进行作品申报。
- 院系初审 预计于第 15 周周四下午举行。
- 院系复审 预计于春季学期第 1 周进行。在院系复审确认推荐名单前,作品信息可以联系申报单位修改。院系复审确认推荐后,作品信息不能进行修改,申报单位也不可补报作品。
- 校级终审 校科协统一组织,于春季学期第 4 周进行。
评审相关
- 院系初审仅对作品立项和进度设计做考察,不设置筛选淘汰机制。
- 院系复审为院系筛选性审查,审查后提交 6 个推荐作品。
- 校级终审为材料网上评审与现场答辩,具体信息请关注后续通知。
- 团体作品的初审与复审后续由校学生科协组织。
- 院系复审完成后,各院系可推荐至多 1 项未通过复审选送且具有交叉学科性质的作品至校学生科协。校学生科协于春季学期第 3 教学周前对校科协作品与院系推荐的交叉学科作品组织复审,筛选不多于 10 个项目进入校级终审。
挑战杯 SRT 专项
-
挑战杯 SRT 专项是 SRT 的一个子项目,随作品申报书(附件 1)申请,无须在 Info 上申报,活动的具体执行由学生科协负责,成绩评定依托于清华大学挑战杯竞赛。
-
推荐以新项目申报挑战杯的作者选报挑战杯 SRT 专项。如同时参与多个项目,可以以多个项目申报挑战杯 SRT。但由于课程号限制,最多只能获得 2 学分,且只能选择一个项目计入成绩。
-
院系复审中,对报名挑战杯 SRT 专项的项目给出三个等级:
- 优秀:项目阶段性成果优秀,由院系推荐进入“挑战杯”后续评审的项目。
- 良好:项目阶段性成果良好,但院系不推荐“挑战杯”后续评审的项目。
- 不通过:相关材料随院系复审材料一同上交。
-
挑战杯 SRT 专项项目应在春季学期第 14 周前完成结题,相关材料后续另行通知。并对相应院系评定等级获得不同项目支持额度。
-
每个挑战杯 SRT 专项参与挑战杯终审并结题后,均可以申请学分,该项目的所有成员均获得 2 学分,项目作者也可以选择不申请学分。挑战杯成绩和挑战杯 SRT 专项成绩的对应关系为:
| 奖项 | 挑战杯 SRT 专项成绩 |
|---|---|
| 特等奖 | 4.0(A+) |
| 一等奖 | 4.0(A) |
| 二等奖 | 4.0(A-) |
| 三等奖 | 3.6(B+) |
| 未获等次奖 | 3.3(B) |
往届优秀范例
面向鼠标操作的软体假肢
团队成员:王栋 贺一鸣 颜登烽 邵逸峰
本作品融合机械工程、计算机等学科,针对上肢截肢者无法操作计算机鼠标的问题,研制出一款基于表面肌肉电信号传感器的软体假肢手。基于绳驱手指和同步带实现掌内操作,通过软体夹爪设计实现稳定抓握;利用神经网络分类器将肌肉电信号映射为操作意图;采用后处理算法简化操作流程,提高操作效率和自然性。
本作品充分利用软材料的特点,在进行掌内操作和抓握过程中为软体机械手提供被动自由度;神经网络分类器直接将肌电信号映射为运动意图,决策窗后处理算法实现了单个手部动作到多个鼠标操作的映射。与现有技术相比,该假肢手充分利用截肢者残肢末端的运动能力,在模拟人手操作鼠标动作的自然性、控制的准确性以及用户操作的便捷性方面均有显著进步,提高了截肢者的计算机操作能力,具有重要的科学和应用价值。

基于惯性传感的多功能手势交互智能指环设备
团队成员:王子轩 尤敬严 赵子轩 王林之 何哲
本研究精心设计并运用了智能指环这一前沿交互设备,有效整合了其节能、高精度、成本效益和便携性等关键特性,从而成功实现了三项重要的人机交互基本功能。这些功能包括:通过手势识别技术进行命令输入,借助触控识别和光标控制实现目标选择,以及利用光标滑动与手势配合完成文本输入。
在功能完备性方面,当前市场上的智能指环,以 Oura 戒指为例,主要定位于健康监测领域。我们实现的同时能实现命令输入,目标选择,文本输入这三个人机交互基础任务的指环在市场上面还没有出现。
在功能效果方面:本研究对挥手、握拳等 17 个常用手势进行了识别,实现了低算力、低功耗条件下的手势识别,识别的准确率可达 93.11%,在业内达到了较高水准。
知识引导的结构化数据学习方法研究
团队成员:刘光奕
这个项目提出了新的知识引导的结构化数据学习方法,在图数据上设计子图网络,以挖掘显式知识,实现准确、可解释的推理;进一步地,通过图模型与大语言模型双向增强从而结合利用显隐知识,实现更加可信的输出。他们在推荐系统和问答系统两个场景中进行了实践,验证了方法性能。对于推荐系统,他们为知识增强型推荐提供了新的思路——子图学习推荐,显著改进了新物品的推荐效果,减轻了对于大量交互数据的依赖,实现了更加准确、高效、可解释的推荐,并产出了论文被国际顶级会议录用。对于问答系统,他们提出使用轻量级图模型辅助大语言模型,为增强大语言模型、提升可解释性提供了新的方案,实现了更加准确、可信、灵活的问答系统,同样产出了论文向国际顶级会议投稿。
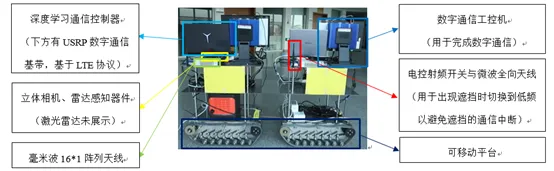
基于雷视感知的毫米波动态通信平台
团队成员:张腾宇、孙杨、尹航、蒋玉骅、蒋沅
本作品搭建了一套视觉-雷达多模态感知辅助毫米波通信的硬件平台。采用立体深度相机、激光雷达等多种传感器,并结合卷积、GRU/LSTM 时序神经网络构造深度神经网络,使得毫米波通信系统能够提前主动感知环境,避免因毫米波直射径遮挡引起的通信中断,并实现实时毫米波波束跟踪、保证动态高可靠的毫米波无线通信。
挑战杯支持
在备赛期间,紫冬科协将全力为各位参赛选手提供各方面的支持。如果你没有合适的项目,我们将提供一些实验室项目资源供你选择。我们也将举办挑战杯微沙龙,邀请往届优秀获奖选手分享他们的参赛故事和获奖经验。资源信息以及报名相关文件将在挑战杯意向群发布,群聊二维码将直接发布在各年级群,请有意愿参加挑战杯的同学及时入群!
点击链接获取报名文件以及报名链接。

THUASTA
清华大学自动化系学生科协
文案 | 石晓玥
排版 | 李语轩
审核 | 张琰然 周义函
自动化系学生宣传平台
欢迎关注紫冬话语