文献解读:Decision Transformer
背景
强化学习(Reinforcement Learning, RL)近年来在游戏、机器人控制和自动驾驶等领域取得了显著进展。然而,传统的强化学习方法通常依赖于价值函数估计或策略梯度优化,这些方法在高维环境、长期规划和稀疏奖励问题上存在一定的局限性。此外,在许多实际场景中,智能体无法与环境进行交互,而是需要利用离线数据进行学习,这进一步增加了挑战。
Decision Transformer 提出了一种全新的思路,即将强化学习任务转化为序列建模问题,并利用 Transformer 架构强大的建模能力来预测最优策略。这一方法在离线强化学习、复杂任务规划以及非马尔科夫决策问题中表现优异,特别适用于需要长期决策的应用,如机器人导航、自动驾驶策略优化和大规模决策系统等。
主要贡献
-
提出了一个将强化学习(RL)抽象为序列建模问题的框架
- 传统 RL 方法:
- 拟合价值函数
- 计算策略梯度
- 新方法将 RL 问题转化为条件序列建模,通过对状态、动作和奖励序列的联合分布建模来替代传统的 RL 算法。
- 传统 RL 方法:
-
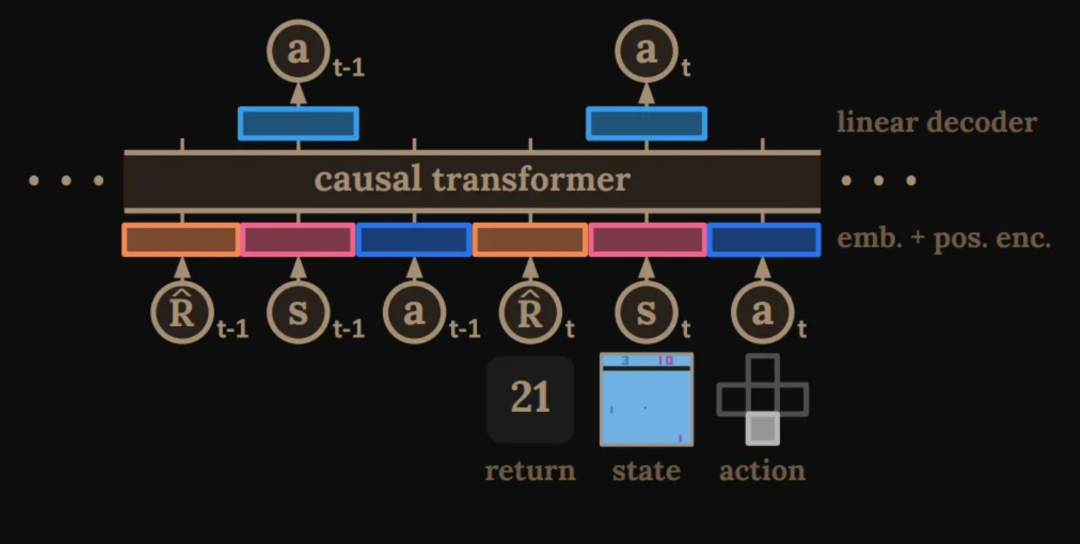
通过利用因果掩码 Transformer,基于期望回报(奖励)、过去的状态和动作进行条件设置,Decision Transformer 模型可以生成实现期望回报的未来动作。
预备知识
离线 RL
在 MDP 中定义,轨迹由状态、动作和奖励序列组成:

在时间步 t 的轨迹回报:

RL 的目标是学习一个使期望回报最大化的策略:

在离线 RL 中,智能体只能使用任意策略的轨迹数据集而不能与环境交互,这比原始 RL 设置更具挑战性。
Transformer
设计用于建模长序列数据(如文本或图像),由带残差连接的堆叠自注意力层组成(包括编码器和解码器)。
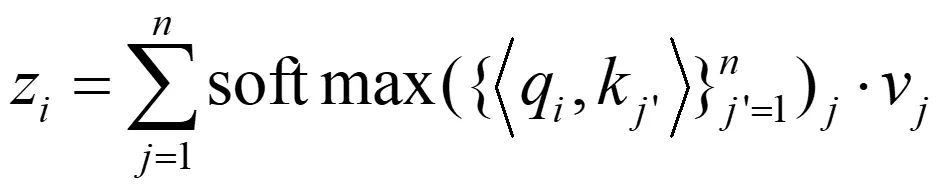
对于每个注意力块:输入 token x 经过线性变换得到 q, k, v 和输出 token
这使得 transformer 模型能够捕捉强化学习问题中状态和回报的关联。
在本工作中,我们使用 GPT 架构,它使用因果屏蔽。我们只对前面的 token 求和,而不是对 n 个 token 求和。
优势:
- 可以建模具有丰富语义信息的高维数据(长序列);
- 零样本和分布外泛化能力;
- 稀疏奖励(注意力机制)。
方法
轨迹表示

表示未来回报,即预期未来奖励的总和。未来回报将作为模型的指令,基于预期回报和当前状态来预测动作。
为什么不使用即时奖励?
我们只需要给出初始未来回报作为输入,因为后续的未来回报可以根据上一个未来回报和即时奖励计算得出。这样初始化更加方便,并且更加具有指导意义。
架构
原始架构
- x → q, k, v(K 个 token)
- 位置编码
我们的架构
- 状态→状态嵌入,动作→动作嵌入,未来回报→未来回报嵌入(线性层)(3K 个 token)
- 时间步嵌入(按时间步而不是按 token)
轨迹表示
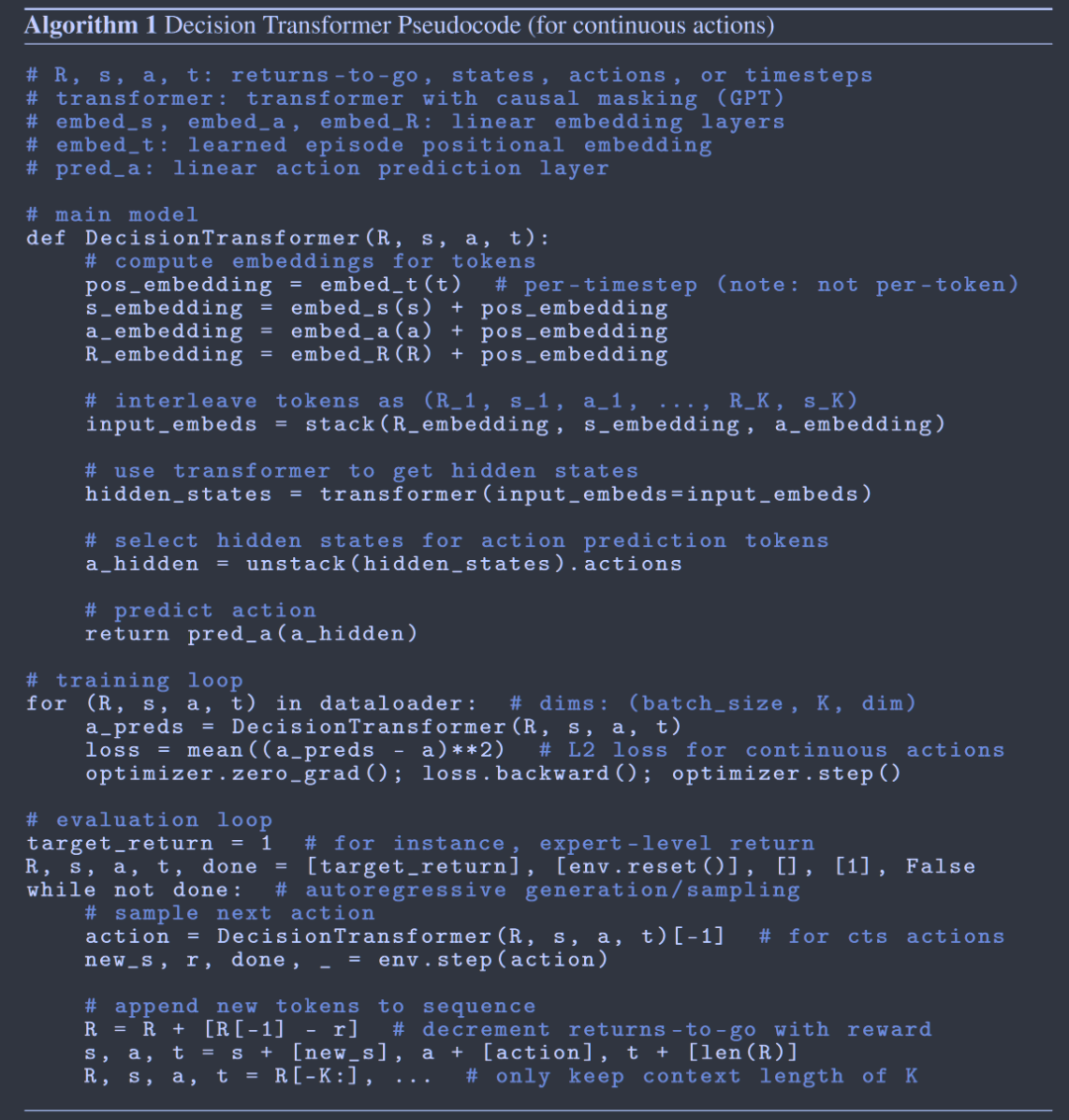
给定离线轨迹,从数据集中采样长度为 K 的轨迹批次,预测动作并最小化损失。
评估
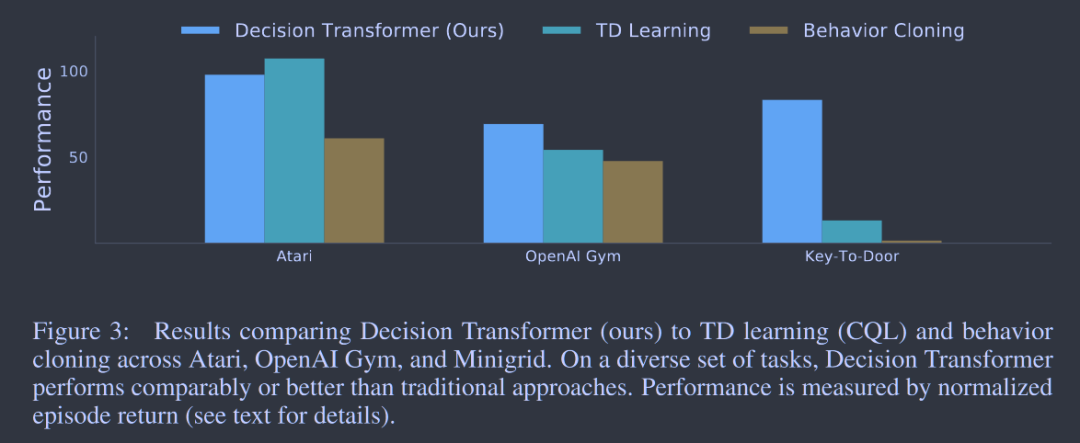
Decision Transformer 表现有效且出色,特别是在长期奖励归因方面。
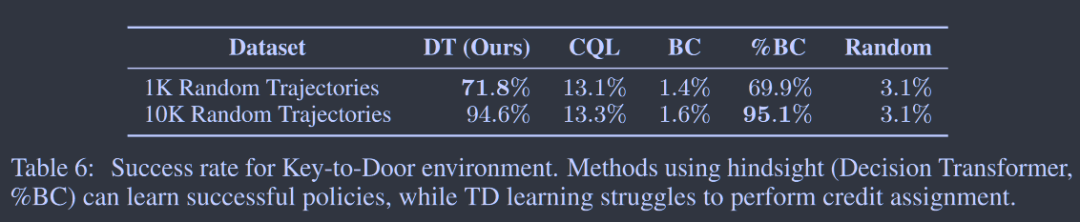
对于小数据集,Decision Transformer 比 Behavior Cloning 表现更好。
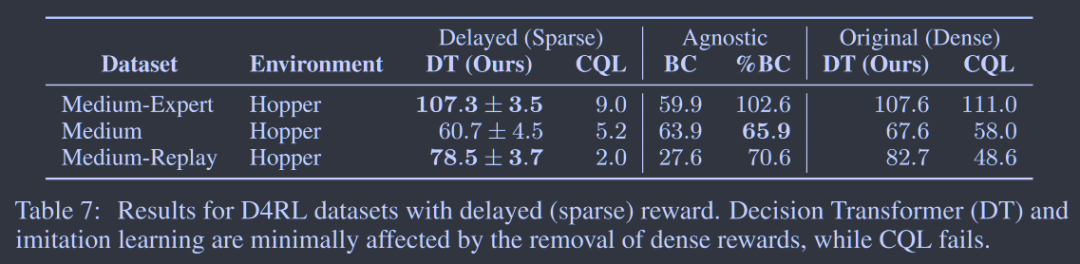
相比于需要密集奖励才能表现良好的方法(如 TD 和 CQL),Decision Transformer 具有很大优势。
总结
总的来说,Decision Transformer 将一种新的序列建模的方式引入了强化学习的问题当中,在长期规划、非 MDP 问题、稀疏奖励问题上表现的比传统的强化学习算法更加出色,并且离线的学习方式也让收集大量数据进行训练成为了可能。未来我们在解决类似强化学习的问题,或者更为困难的问题时,Decision Transformer 可能可以作为一个不错的基准模型,供我们进行改进与提高,使其更加适应我们的问题解决。