经典论文 3D Gaussian Splatting 解读及实验进行
引言
场景三维重建技术经历了从离线到实时、从被动到主动的不断演进。早期的三维重建依赖于静态图像和离线计算,主要通过立体视觉和结构光方法(如结构从运动 SfM)来从多个视角的静态图像中提取三维信息。这些方法通常计算量巨大,且需要在所有图像采集完成后才能进行处理,因此无法实现实时重建。MVS(多视角立体重建)是这一时期的代表技术,开源软件 Colmap 便是一个典型的解决方案。
随着技术的发展,三维重建逐步向实时环境过渡,目标是能够在实时估计相机运动轨迹的同时构建环境地图,用于定位和导航。这一进展主要通过 SLAM(同步定位与建图)技术实现,它可以达到每秒 30 帧以上的实时性能。
进入到主动时代,场景重建开始使用神经辐射场(NeRF)等光场方法,通过神经网络实现高质量的三维重建。NeRF 通过连续的场景表示并优化多层感知器(MLP)来捕捉场景的新视角。这类方法通常利用体素[Fridovich-Keil 和 Yu 等,2022]、哈希网格[Müller 等,2022]或点云[Xu 等,2022]等结构来存储连续场景表示,尽管这些方法能够优化渲染效果,但随机采样的过程非常昂贵,且容易导致噪声。
2023 年,3D 高斯作为一种新的场景表示方法被提出,提供了更高的灵活性和表现力。其与 NeRF 类似,采用 SfM(结构从运动)校准的相机,并基于 SfM 过程中产生的稀疏点云来初始化 3D 高斯集。与依赖于多视图立体匹配(MVS)数据的点云方法不同,其只需要使用 SfM 生成的稀疏点云,就能够获得高质量的三维重建结果。
其主要有三个关键部分:
- 使用 3D 高斯作为表征,因为它们不仅可以作为可微分的体积表示,还可以通过投影到二维并应用标准的 𝛼 混合方法实现高效的光栅化,与 NeRF 使用的图像生成模型类似。
- 对 3D 高斯属性的优化。通过与自适应密度控制的步骤交错进行,在优化过程中会动态地添加和移除 3D 高斯点,从而产生一个相对紧凑、非结构化且精确的场景表示。对于所有测试场景,最终的高斯点数量一般在 1 百万至 5 百万之间。
- 提出了一种实时渲染解决方案。该方案采用了一种快速的 GPU 排序算法,并遵循了最近的研究[例如 Lassner 和 Zollhofer,2021]。得益于 3D 高斯表示,我们能够进行各向异性的 splatting,通过可见性排序、排序和 𝛼 混合技术,实现高效且精确的反向传播。
核心理论
3D 高斯函数沿某一轴进行积分后等同于 2D 高斯函数,这是由于高斯函数的一些性质决定的。
- 高斯函数是可以分离的,即多维高斯函数可以表示为各个维度上的一维高斯函数的乘积。这意味着,多维高斯函数沿某一维度进行积分,就相当于将这一维度的一维高斯函数积分到 1,剩下的就是其他维度的高斯函数,即一个低一维的高斯函数。
- 高斯函数的边缘分布也是高斯的。多维高斯函数的边缘分布就是将某一维度积掉,得到的结果仍然是高斯的。这再次证明了 3D 高斯函数沿某一轴进行积分后等同于 2D 高斯函数。
这个性质在图形学中有很重要的应用,例如在 3D Gaussian Splatting 中,将 3D 高斯投影到投影平面后得到的 2D 图形称为 “Splat”,然后通过计算待求解像素和椭圆中心的距离,可以得到不透明度。由于 3D 高斯的轴向积分等同于 2D 高斯,可以用 2D 高斯直接替换积分过程,从数学层面摆脱了采样量的限制,计算量由高斯数量决定,而高斯又可以使用光栅化管线快速并行渲染。
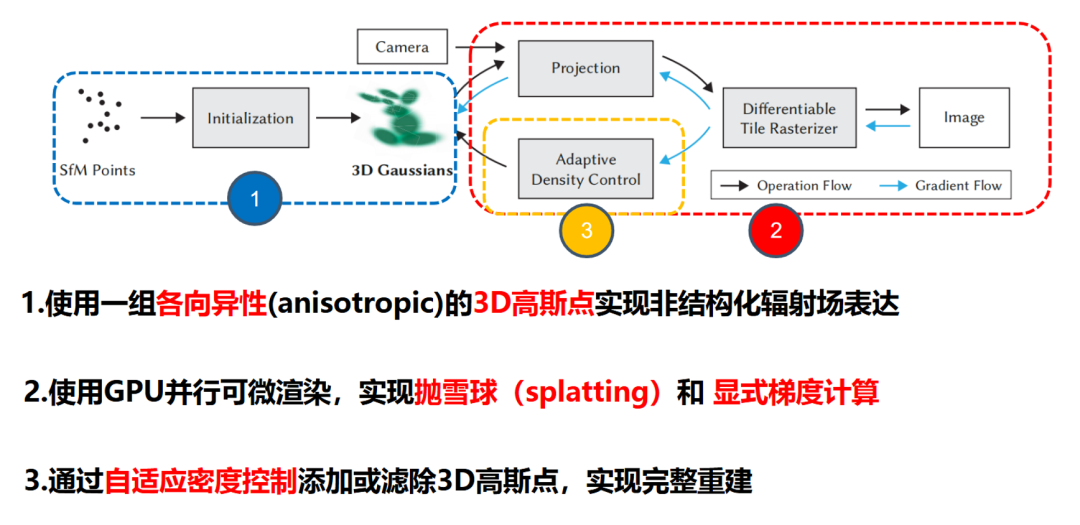
以上是代码最核心的 pipeline,首先将点云输入转化为一组 3DGS 点的表述,之后通过 GPU 进行并行渲染,并进行显示梯度计算(其将梯度计算的过程写为 CUDA 代码进行显示的前向后向推导,将每一步都进行单独的计算,而不是自动求导来进行优化),最后通过自适应的密度控制来完成重建,而具体的训练流程如下图所示:
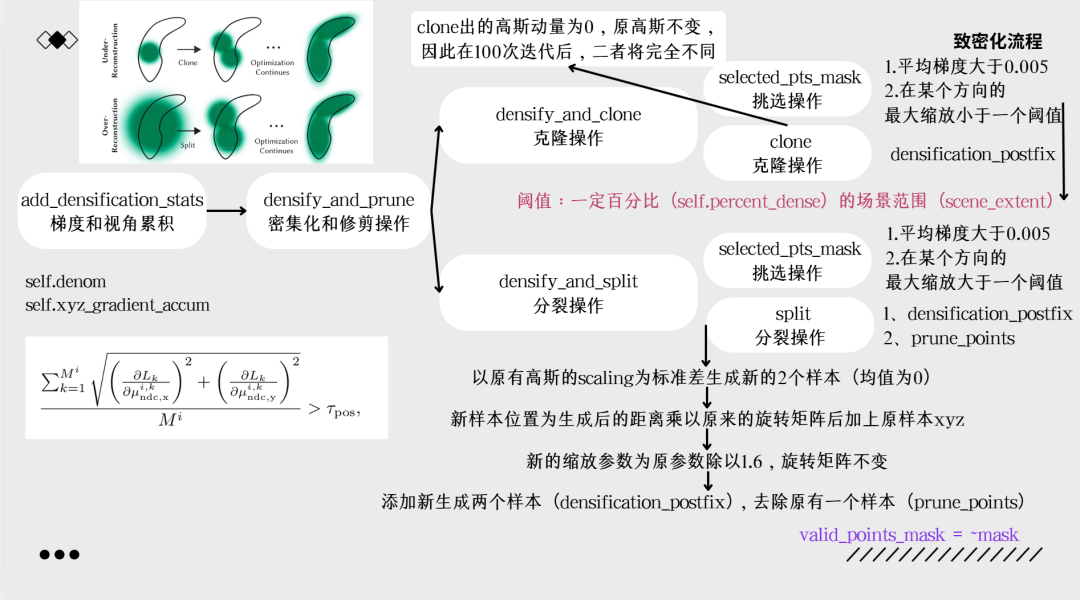
其主要通过梯度累计,去将梯度过大并且缩放过小的高斯球进行克隆,将梯度过大并且缩放过大的高斯球进行分裂。通过自适应的密度控制来进行 3DGS 数量的控制。
环境配置
3DGS 的环境配置较为复杂。
前置工作
-
Colmap下载
下载 release 版本即可。
-
Visual Studio 2019 下载
注意注意不要下载 2022,可能会报错。
安装后在 installer 中安装 C++ 相关内容。
-
CUDA 安装
注意仅适用有显卡的机器。
-
进入 CUDA Toolkit Archive,选择 CUDA11.8(几乎是最适配版本,官方给出 11.6,但有些问题),之后按照系统安装即可(在 VS2019 安装后再安装 CUDA)。
-
安装结束后,打开终端键入:
nvcc --version -
显示如下,即为成功。(此处为安装的是 CUDA11.3)

-
anaconda 安装与配置
-
使用 git clone 自动下载源码,终端输入:
git clone https://github.com/graphdeco-inria/gaussian-splatting.git --recursive -
下载完成后检查
gaussian-splatting/submodules/中是否有diff-gaussian-rasterization,并检查其下是否为空;检查diff-gaussian-rasterization/third_party/glm中是否有内容。同样检查submodules/simple-knn。如果没有内容,可通过以下链接手动下载并解压到相应位置: -
在 anaconda 中新建环境
gaussian_splatting,按照下述命令安装:# 安装 pytorch
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
pip install plyfile tqdm
pip install diff-gaussian-rasterization
pip install submodules/simple-knn -
安装可视化软件(Windows 系统,确保在
gaussian-splatting目录下,且安装了 cmake):cd SIBR_viewers
cmake -Bbuild .
cmake --build build --target install --config RelWithDebInfo
实验与结果
实验数据一半如下组织:
<location>
|---images
| |---<image 0>
| |---<image 1>
| |---...
|---sparse
|---0
|---cameras.bin
|---images.bin
|---points3D.bin
sparse/0/为 colmap 稀疏重建的结果。
之后运行:
python train.py -s --eval # Train with train/test split
python render.py -m # Generate renderings
python metrics.py -m # Compute error metrics on renderings
即可得到训练后的结果,并且得到渲染后的图片与评估的结果。
训练后可以用这个命令查看:
./<SIBR install dir>/bin/SIBR_gaussianViewer_app -m <path to trained model>
也可以进入 gaussian-splatting/viewers/bin 文件夹后用以下命令来运行:
./SIBR_gaussianViewer_app.exe -m <path to trained model>
以下为我个人的样例训练结果:
